Horse's Joint Rotations - Important
- Details
- Category: Biomechanics
Joint surfaces are not symmetrical like a door hinge or a ball and socket, and that makes the limbs rotate when they flex and extend. Joint rotations can be synchronized such that all joints are rotating as designed, or rotation can be asynchronous when one or more limb segment is forced to rotate beyond the design limits. Watching the hind limb, at the stifle joint or point of hock, and it should be relatively easy to observe that while the limb joints are flexing and extending, the motion of does not follow a straight line. For example, viewed from behind, the point of the hock moves up when the limb is flexed but it also moves side to side.
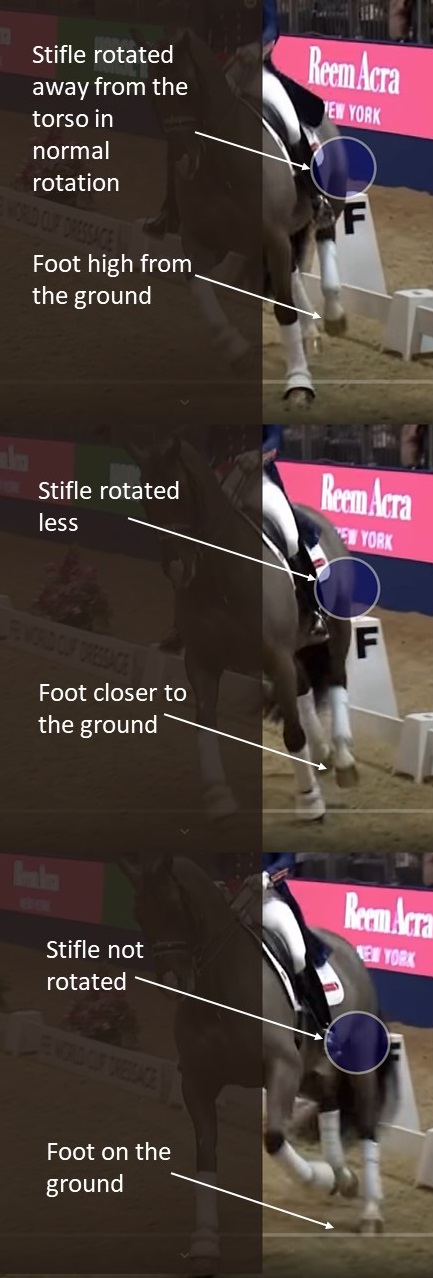
Healthy kinematics includes joint rotation in a specific timing with the phases of a stride, determined by the way the particular unique conformation. The image shows three points in time where the stifle joint is in different states of normal rotation. In unhealthy kinematics the synchronization is wrong – asynchronous, and when that is repeated over and over, it is a form of overloading that can cause joint / tissue injury.
A common situation that can cause asynchronous joint rotations is when the hind limb stride is long while the pelvic rotation is inadequate. In very slow motion video, extra rotational movement can be observed in the hind limb joints. When the motion is in the state of consistent habitual overloading, central pattern generators (CPG's) are established for the unhealthy movement pattern and new CPG’s need to be created to prevent, stop or slow the accumulation of damage.